ROBOTICS APPLICATIONS
by Pankaj Bagga
Robotics Application
Space Robotics

The examination territory Space Robotics manages the improvement of insightful robots for extraterrestrial investigation concentrating on:
- Advancement of robot frameworks for unstructured, uneven territory in view of naturally propelled imaginative movement ideas
- Advancement of multi-useful robot groups usable for various undertakings extending from in-situ examinations to the association and support of foundation
- Reconfigurable frameworks for planetary investigation
- AI-based techniques for self-governing route and mission arranging in obscure landscape
- Picture assessment, question acknowledgment and landscape demonstrating
- AI-based emotionally supportive networks for logical trials
Underwater Robotics

This zone manages the advancement and acknowledgment of Artificial Intelligence techniques in submerged frameworks. Fundamental purposes of research are:
- Improvement of frameworks for client bolster in remote-controlled submerged vehicles utilizing virtual inundation strategies
- Outline of techniques for self-sufficient control and mission arranging of robot arms in submerged applications, especially with cutting edge sensor innovation, for example, “Visual Servoing”
- Picture assessment and protest acknowledgment with measured and smart submerged cameras
- Plan of control techniques for cutting edge independent submerged vehicles
- Improvement of organically enlivened and vitality productive techniques for transport for submerged vehicles, for example, swaying frameworks
Electric Mobility
In the field of electric versatility we are trying ideas for electric vehicles, battery charge advances, and the gathering of vehicle information. We are making models for canny, naturally solid, and coordinated urban versatility. Our exploration centers around:
- Improvement and show of creative vehicle ideas
- Outline of new ways to deal with portability and activity control, application bolster, innovation combination
- Information accumulation by armada tests with innovatively extraordinary electric vehicles (see E-Mobility fleet in Research Facilities)
- Coordination of the local undertaking office of the model district Electric Mobility Bremen/Oldenburg
- Virtualization of the model district, recreation of future, bigger vehicle armadas, and expectations of the consequences for the model area as far as movement volume, framework needs, ecological contamination, and financial effectiveness
- Making an establishment for new plans of action and activity ideas based on the information beforehand gathered
Logistics, Production and Consumer (LPC)

In the territory Logistic, Production and Consumer (LPC) new frameworks are created which will enhance taking care of and booking assignments by utilizing techniques for Artificial Intelligence and imaginative mechatronic ideas:
- Quick, self-learning picture acknowledgment and grouping to recognize generation shortcomings
- “Visual Servoing”- techniques to sort piece merchandise
- Canny generation memory in view of RFID contributes calculated chains
- Treatment of deformable piece products
Search and Rescue (SAR) & Security Robotics

Around there, robots will be created to help safeguard and security work force. Primary purposes of our exploration are:
- Improvement of very versatile stages for indoor and open air applications
- Improvement of self-governing frameworks that can distinguish potential casualties (SAR) or interlopers (Security)
- Improvement and use of best in class sensor innovation in view of radar, laser scanner, and warm vision to recognize items and people, resp.
- Implanting of robot frameworks into existing salvage and security foundations
- Self-ruling route and mission arranging
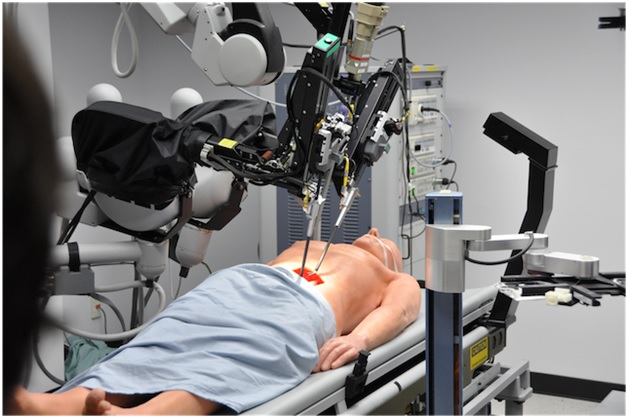
Assistance- and Rehabilitation Systems

This field manages mechanical frameworks that can bolster people in perplexing, depleting or regularly rehashed assignments. Application zones are both help amid activites of regular day to day existence (at home or work) and medicinal recovery. Support can either happen utilizing frameworks the human is wearing like exoskeletons or orthoses, or by benefit robots playing out the separate assignment.
Core topics include:
Idea advancement, outline and development
keen equipment framework structures
programming designs
inserted biosignal investigation, e.g. utilizing data from:
muscle (EMG)
eye (eyetracking, EOG)
or on the other hand from cerebrum movement (EEG)
combination of various sensors
coordinate online flag handling (hard-and programming)
hearty learning frameworks skilled to adjust
joint correspondence layers for better human-machine collaboration
(semi-)self-rulingly acting frameworks
help as-required
Agricultural Robotics

We create robots for horticultural applications and exchange strategies and calculations from apply autonomy to regular agrarian machines. Our goal is to expand the execution of machines and forms and to lessen asset utilization in the meantime. Our exploration is centered around innovation applications utilized as a part of the development of land. Essential research points are:
- Techniques for self-sufficient arranging and route of open air hardware
- Techniques for ecological acknowledgment in horticultural hardware control
- Techniques for infield coordinations to streamline participation and asset utilization between different farming machines
- Interoperability at the level of correspondence, procedures and learning preparing
Recommended Posts
Robotics and Artificial Intelligence Projects Help in Vancouver | Surrey BC
16 Mar 2019 - Robotics, Tech Update

